
Publication
Evaluating the Efficiency of Six-DoF Haptic
Rendering-Based Virtual Assembly Training
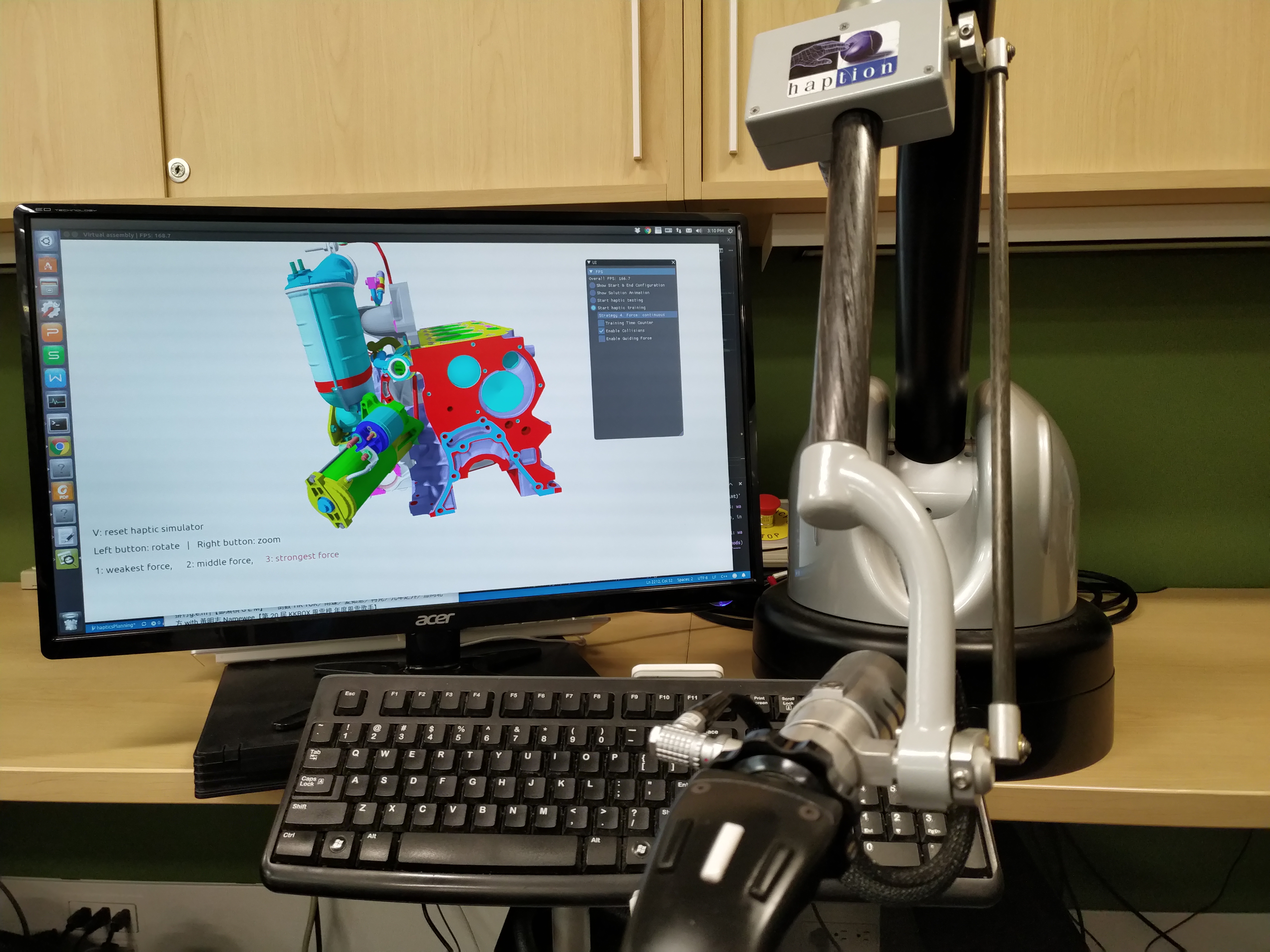
Abstract: Haptic-based virtual assembly plays an important role in training users to perform real-world assembly of complex machinery. Previous work mainly focused on efficient collision detection and 6-DoF haptic rendering of contact in the presence of complex geometry. However, as our work shows, this alone is not sufficient for efficient virtual assembly training. Even though the solution trajectory by which a certain part is inserted into its place is known, it is generally not easy for users to learn to perform the task, based on solely a stable and efficient haptic rendering system. Our work aims to analyze and improve the training efficiency of haptics-based virtual assembly systems, by presenting and evaluating two learning tools that augment contact-based haptic rendering: Visualization Guidance, and 6-DoF Force Guidance. Assuming a known assembly path that the trainees need to learn, we demonstrate how to augment 6-DoF haptic rendering with visualization guides, and a stable haptic guiding force. Our visualization guidance consists of displaying animations of the correct assembly path, and visual motion indicator cues. We also design a user study to evaluate the efficiency of these tools for training users to perform complex virtual assembly tasks.
All training strategies: